Pandion VTOL Drone
I have started getting into R/C aircraft recently and have been building a small twin rotor VTOL. The eventual plan is for it to be an aerial imaging platform that doesn't need a runway for launch and retrieval. For now, just getting it to hover stably has been quite the challenge.
Configuration
Initially I had planned on this being a tri-copter with even distribution and forward sweeping wings on conversion, but this had a lot of un-needed complexity and the cost of the rear engine would be high.
The main concern was to put the C of G in the right positionon during forward flight and being able to balance while hovering. I've been getting more comfortable with Fusion 360 and it is an amazing tool to work with. I took the time to add the approximate weight of materials and the balance and weight was quite close in the finished product.
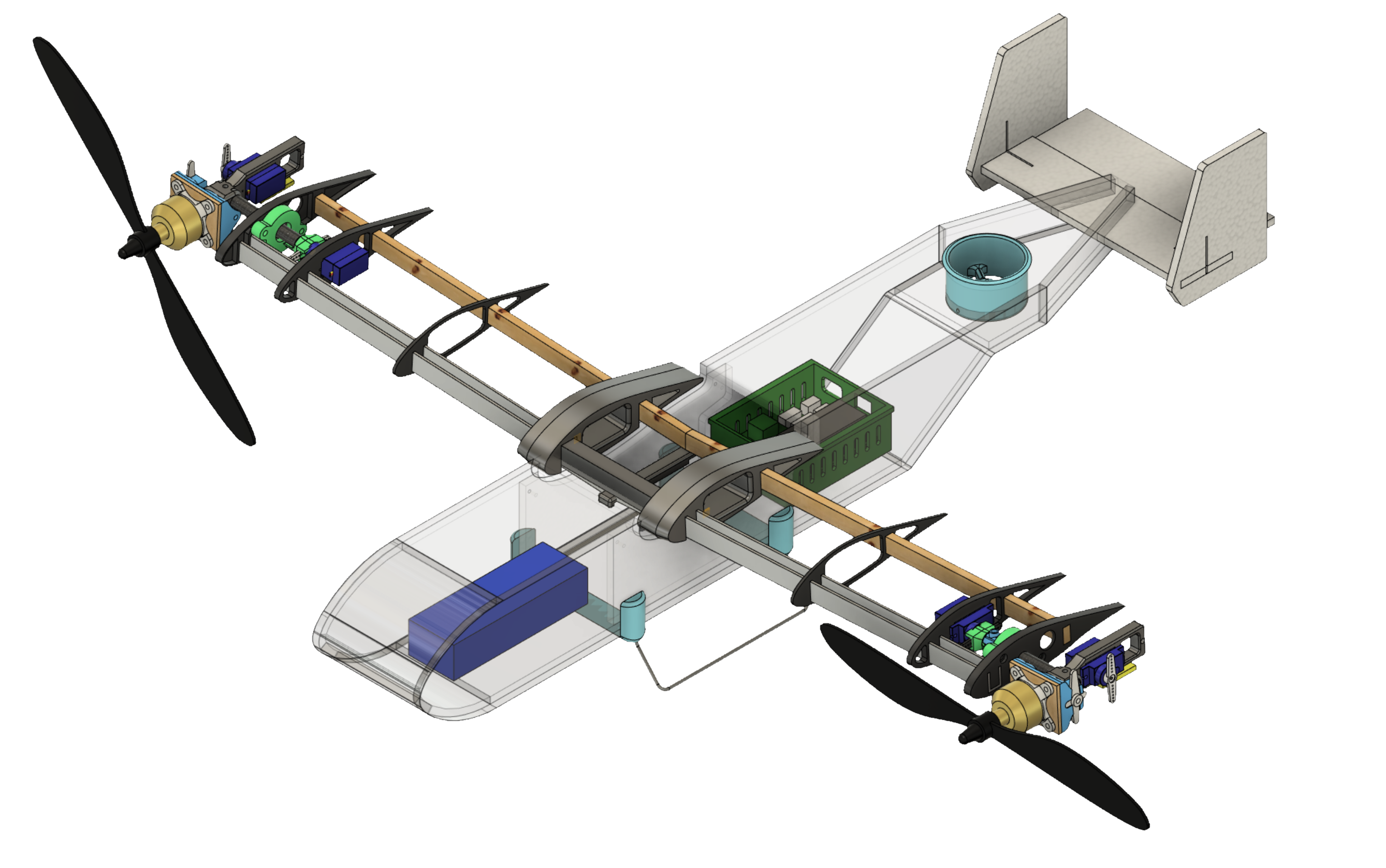
The latest configuration is pretty close to a V-22 Osprey so the genus Pandion seemed like an appropriate name. The ducted fan in the rear is purely for pitch control so I would consider it a bi-copter.
I've seen other bi-copters that will balance 2 axes, but it has been nice to have one control motion per axis with the ducted fan handling pitch. Initially, I used small geared motors with encoders, but I had difficulty getting them to run consistently.
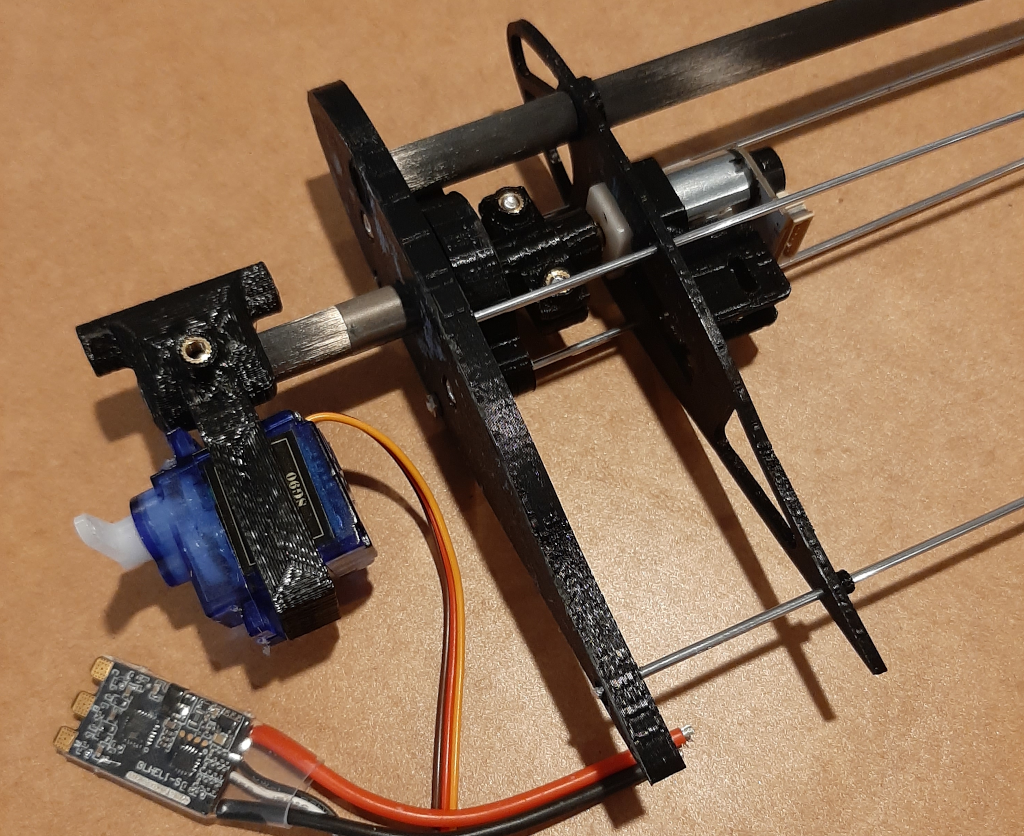
9g servos in the nacelles provide yaw control when hovering and role control in forward flight.
Materials
You'll notice I originally used a carbon fibre main-spar and the axle for the nacelle. The extruded tube I used originally tended to crack and I had much better results with a proper weaved fibre tube later on. In early versions, I also used aluminum tig wire in combination as stringers in the wing. Later designs used aluminum c-channel for the main spar and a wooden rear spar which provide plenty of support.
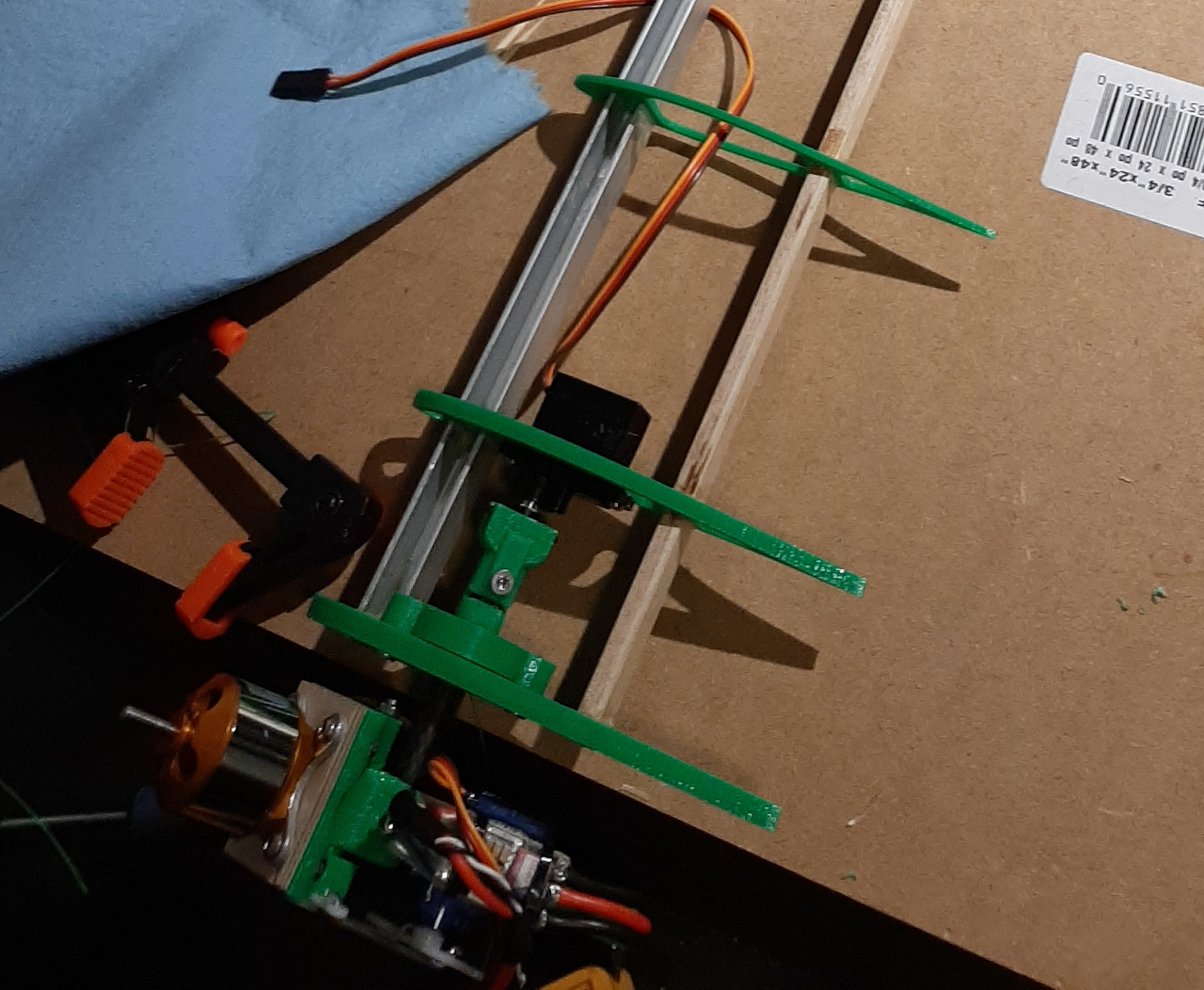
9g servos controlled the nacelle pitch and fine engine pitch control. While testing, I stripped a few nylon gear servos since the nacelles are quite front heavy. After replacing them with metal-gear servos, there hasn't been any problems. PLA has worked well for the wing ribs and various pieces. At some point, I may try out foam filament.
Electronics
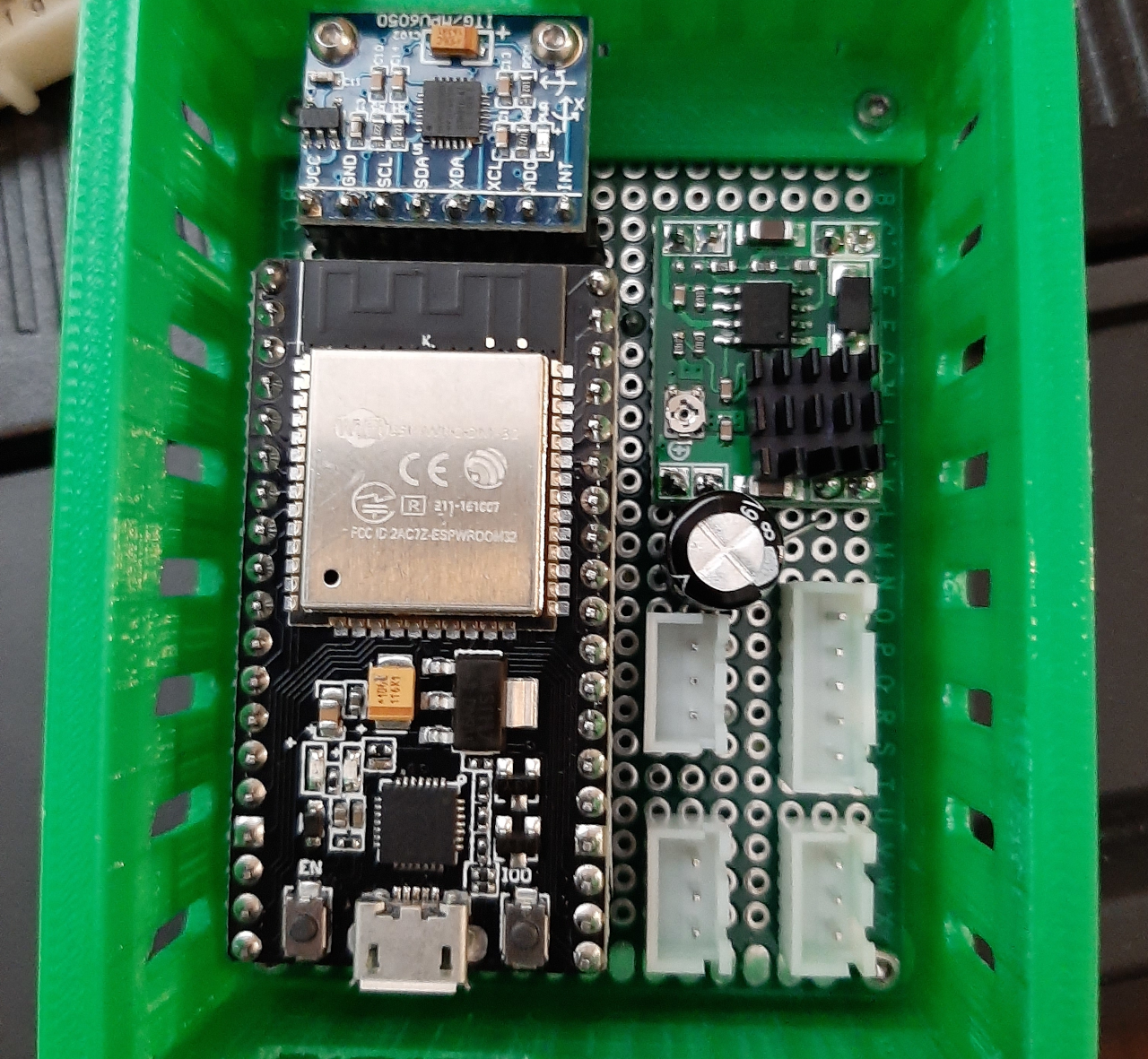
I've used an MPU-6050 gyro, a FlySky receiver, 3 small ESCs, 3 buck-converters, and an ESP-32 to control everything. A flight controller would have made things easier, but part of the challenge was writing the software from scratch. Also there is not a lot of control software that will change between configurations at run-time.
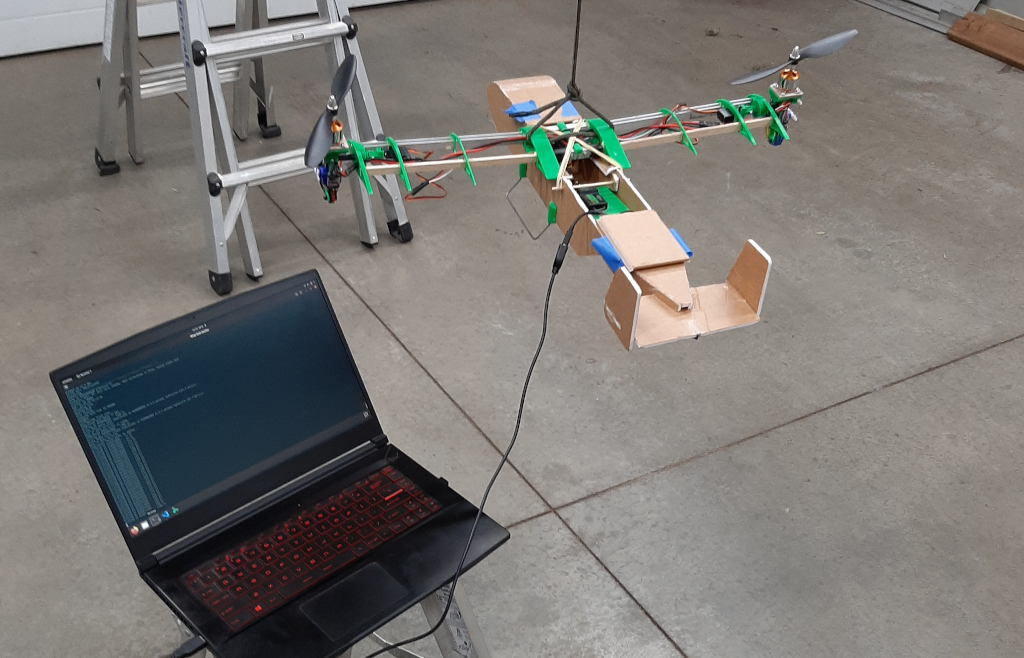
I then mounted the control board to the wing on a pivoting test stand to help develop the control software.
Foam core with hot glue has been great to use for the wing covering and fuselage. It's easy and quick to work with when prototyping like this.
Software
The Pandion VTOL repo has all the software for the project. Early on, I used some arduino sketches, but I've found ESP-IDF is easier to develop for a project like this.
The gyro is read over I2C so this was fairly easy to implement. I ended up polling periodically, but I may look into using interrupts at some point.
I managed to reverse engineer the FlySky receiver with the help of a logic analyzer. Currently I'm providing the battery voltage as a sensor with a simple voltage divider, but the ground-work is there in-case I need more. The channel values are read on another pin digitally.
Getting d-shot to work for the ESCs was a little tricky, but the logic analyzer and the output from a flight controller helped me tune the timing. I flashed the rear ESC with BL Heli to make it reversable.
I've implemented a PID controller with a positive and neutral stability mode. I then wrote a tcp server so the ESP-32 acts as a WiFi hot-spot, for updating values remotely. I then created a client in fyne to send commands and this has made tuning the PID values much easier.
Will it Fly?
The stability needs some work, but the power to weight to weight is plenty.
I will keep tuning the controls until I feel confident in its ability to hold station. Once that is done, I should be able to tune for forward flight with the safety net of hovering.